网站首页
服务项目
影视航拍 摄制
720°全景漫游 摄制
航测,正射影像,倾斜摄影
正射影像 摄制
无人机定制
影视制作
航拍案例
航拍资讯
关于我们
联系我们
——
航拍
资讯
——
AERIAL INFORMATION
一切从飞控开始说起……(下)
发布作者: 发布时间:2017-02-08 16:10:29
放假回来了,但是楼主并不想上班……
我们继续节前的话题开始讲起,说了工业无人机、大型喷气客机,我们回到消费级无人机上来。大疆能够成为无人机的代名词,迅速拉低航模飞行的门槛最重要的就是可以做到RTF(到手即飞)
精灵2
精灵3
到手即飞免去了大量的前期工作(自己拼装机架、选择飞控、选择电池、动力系统、组装、调试),说不定首飞就爽炸
这都是家常便饭。而且自己组装的航拍飞行器在可靠性、成像质量上都会有很大的不确定性。但大疆的出现成功将上述问题一一解决,我们可以更加专注于拍摄与创作。这一且都要归功于飞控,让飞行变得简单!先撇开大疆闭源飞控不谈,市面上大量的开源飞控,以楼主手中的CC3D飞控为例。
CC3D主飞控板
这款飞控目前安装在楼主210的穿越机上,带自稳并可外接其他模块。其芯片为意法半导体STM32F103,这一些列的芯片也被用于很多开源飞控上。
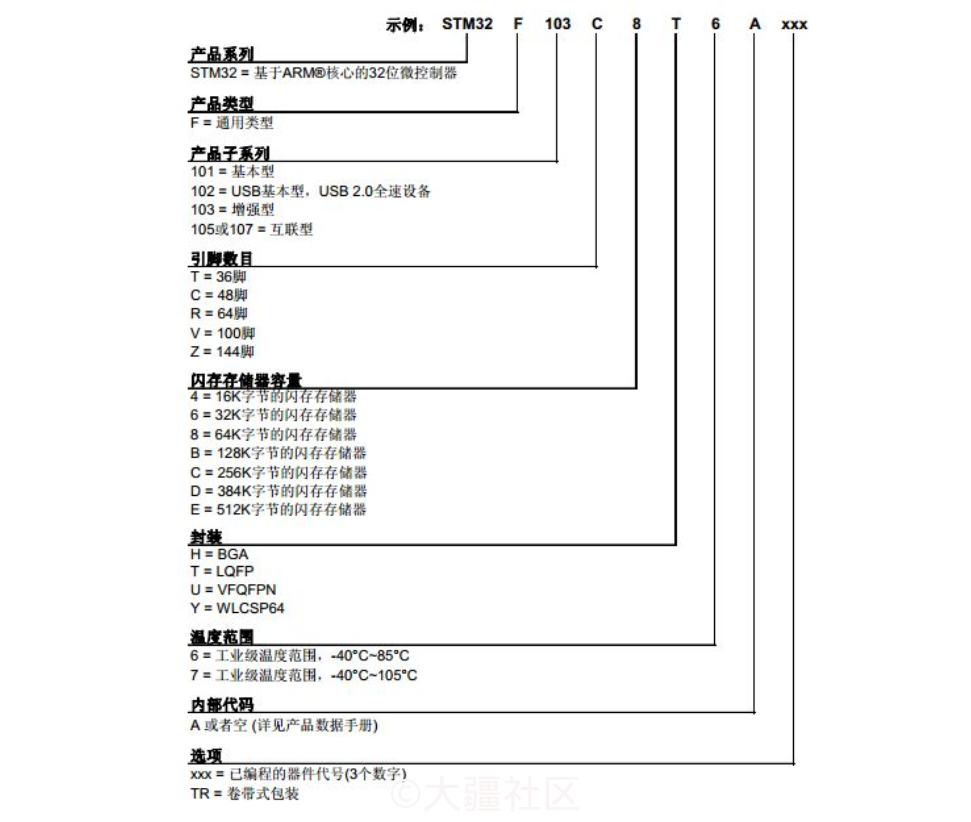
STM32系列芯片
那么这款芯片和大疆有什么关系?不错,这一系列的芯片也是大疆精灵3的飞控主芯片,只不过大疆使用的是STM32F4系列。有些会人说大疆这么高大上的无人机能使用这么low的飞控芯片?
STM32芯片参数注解
芯片不存在low不low的问题,够用就行!这是真的,
因为对于精灵3没有视觉处理来讲,飞控的核心PID算法运算量并不大,STM32F4完全足够了。相同的PIXHAWK也是使用的STM32F4。一家企业出于成本的考虑总不能为了高逼格连一个不太复杂的算法都上i5、i7吧!功耗、续航都是不允许的。至于精灵4这种带视觉处理的飞机用的是什么芯片楼主就没有深究过了,一没时间,二没钱,没钱是关键
但可以肯定的是精灵4芯片的计算量肯定与精灵3不是一个量级的。
-------------------------------------------------------------华丽的分割线---------------------------------------------------------
一直在说飞控芯片算算算,那飞控到底算的是什么?还是以手中的CC3D来讲。
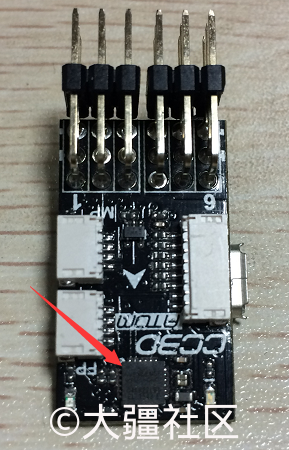
MPU6000传感器
CC3D中的飞行器的姿态数据主要是来自这颗MPU6000传感器,整合陀螺仪与加速度计。一般情况下多旋翼的自稳,平稳飞行有这颗传感器足矣。可是市面上的飞控种类这么多,性能差距为什么会这么大呢?这需要从陀螺仪与加速计的尿性说起!
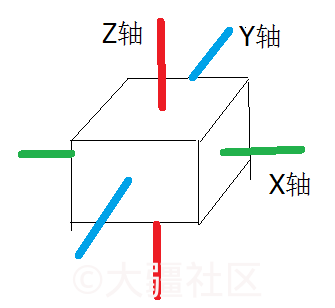
如图(请忽略楼主的画工),理想状态下我们把传感器想象成这样一个立方体,一共六个面、两两一组组成一个轴。现在将图上的X、Y、Z轴固定在一个卡车的集装箱内,当卡车在停止状态下,三个轴当中只有Z轴会因为重力有度数。这时飞控可以很清楚的知道目前飞机在一个怎样的姿态,可是如果卡车在一条非常颠簸的路上狂奔的时候,三个轴都会随着卡车的颠簸而抖动,但是由于惯性三个轴的移动不是与卡车同步。因此这个时候三个轴姿态度数就不与卡车实际状态是一致的,同理到多轴飞行器上,电机的震动、飞行器的惯性都会影响传感器的度数。我们称之为“
杂波
”。
反观陀螺仪,高速旋转的陀螺仪是不会倒的,而且会尽力保持当前姿态也不容易受震动的影响。但是陀螺仪有一个天然的弊端就是会因为时间累积误差慢慢变大,造成“
漂移
” 漂移会有多大?看看早期的V2导弹的精度就知道了,打中目标全靠人品!
V2导弹
所以到这里我们就知道了短时间加速计不可靠因为震动,陀螺仪长时间不可靠因为漂移。一款好的飞控在上述两者之间会有一个很好的算法,再上各种滤波(卡尔曼滤波、平均值滤波、bulabulabula),我们的飞行才可以如此自如。
大疆无人机在这个基础上加入了气压定高、超声波定位、视觉定位和GPS,这才使到手即飞变为可能。大疆还有什么黑科技我们不得而知,我们只知道真正的科技就是让你感受不到科技的存在,当我们用全新的视角记录下那一张张美好、珍贵的画面时,这也许就是科技存在的价值。
最后,感谢大疆能在国内奉行拿来主义环境中任然坚持创新。我们期待更加完美的产品! (完)
上一篇:
鸟瞰大事记!5~8月 热血高飞!
下一篇:
鸟瞰重庆|带着无人机闹元宵,鸟瞰灯光汇成星海
地址 / ADDRESS
重庆南岸区回龙路83号 山水长天1栋1-6
电话 / TELEPHONE
+86-177 0234 0008 (023)-6294 9379
邮箱 / MAILBOX
9398988@qq.com
友情链接:
航拍航测
|
重庆音响
|
锋兰矿山
|
DJI大疆创新
|
重医附二院
|
鸟瞰素材基地
|
热门搜索:
重庆航拍
720VR全景
实景三维建模
倾斜摄影
Copyright@2014重庆鸟瞰文化传播有限公司 ALLRights Reserved 技术支持:
卓求网络
后台登录





 这都是家常便饭。而且自己组装的航拍飞行器在可靠性、成像质量上都会有很大的不确定性。但大疆的出现成功将上述问题一一解决,我们可以更加专注于拍摄与创作。这一且都要归功于飞控,让飞行变得简单!先撇开大疆闭源飞控不谈,市面上大量的开源飞控,以楼主手中的CC3D飞控为例。
这都是家常便饭。而且自己组装的航拍飞行器在可靠性、成像质量上都会有很大的不确定性。但大疆的出现成功将上述问题一一解决,我们可以更加专注于拍摄与创作。这一且都要归功于飞控,让飞行变得简单!先撇开大疆闭源飞控不谈,市面上大量的开源飞控,以楼主手中的CC3D飞控为例。 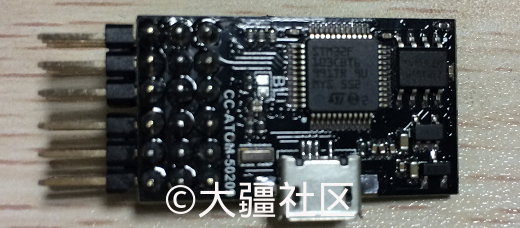

 但可以肯定的是精灵4芯片的计算量肯定与精灵3不是一个量级的。
但可以肯定的是精灵4芯片的计算量肯定与精灵3不是一个量级的。